
当前位置:首页 > 产品中心










































两个动颚位置不受运动学参数限制

颚式破碎机运动学和动力学参数设计与优化 百度学术
(1)本文以PE1007型复摆颚式破碎机为例,基于MATLAB软件对其进行了运动学与动力学参数优化,优化结果表明:排料口处的特性值为1697,与此型号传统破碎机相比减小了50%,优化 本文以单颗粒破碎且单颗粒物料在破碎腔内经五次破碎从排料口排出为假设条件,在确定复摆颚式破碎机的工作参数后得到基本尺寸的基础上,以复摆颚式破碎机整机实体测绘模型为 颚式破碎机的运动学及动颚和机架的仿真与优化 百度学术

颚式破碎机的运动学及动颚和机架的仿真与优化 豆丁网
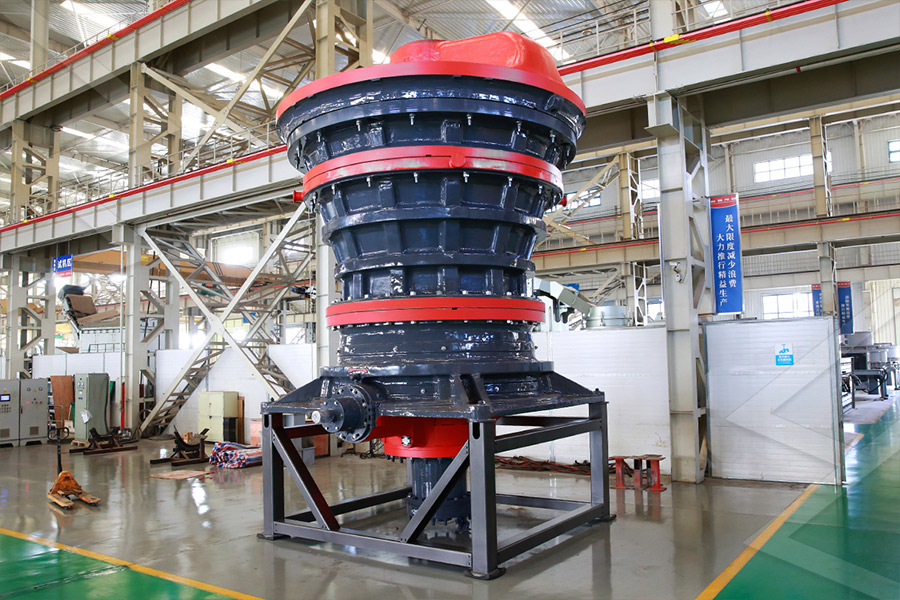
2024年6月2日 动颚的运动学分析是通过研究动颚的运动规律,如动颚的运动轨迹、 运动速度等,来了解物料在破碎过程中的运动情况。 机架的运动学分析由受力曲线可以看出:构件1运动过程中,受力呈周期性变化,而且受力变化比较不均匀,可以看到在加速度的转折处,受力是比较大的。 LBC LBF颚式破碎机运动学、动力学分析 百度文库
.jpg)
颚式破碎机运动分析 豆丁网
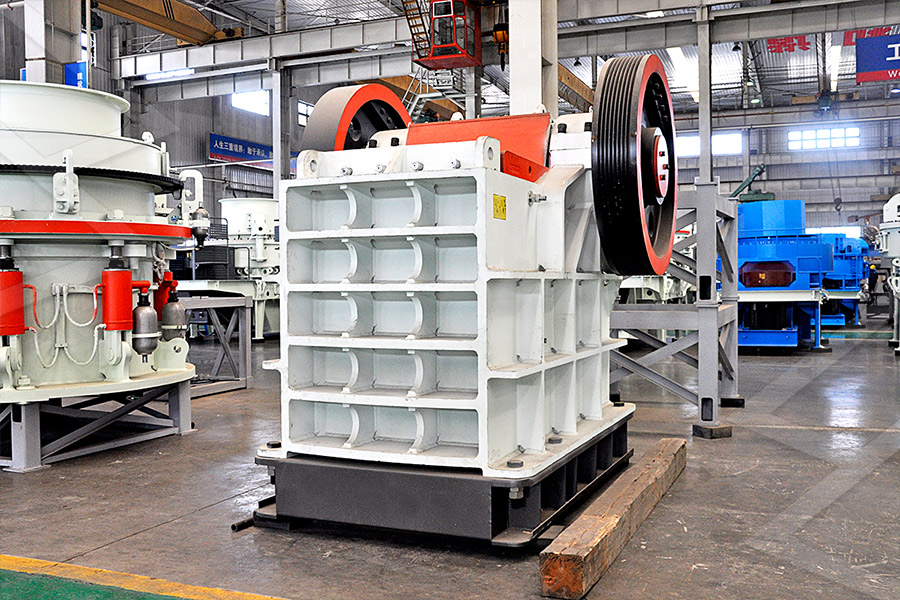
2018年2月10日 动颚具有很好的运动特性 是保证颚式破碎机具有最佳性能的根本因素,本文破碎机的最佳运动特性是借助 动力学仿真分析所得到的。 MATLAB是由一系列的工具 2013年12月5日 在保证动颚运动特性的条件下, 尽量减小偏心距值, 在传统的设计黄总, 偏心距可根据动颚行程, 画机构图来确定, 也可以用分析法确定。 阅读了该文档的用户 颚式破碎机动颚行程及相关参数的确定 道客巴巴
.jpg)
颚式破碎机分类及研究现状综述 百度文库
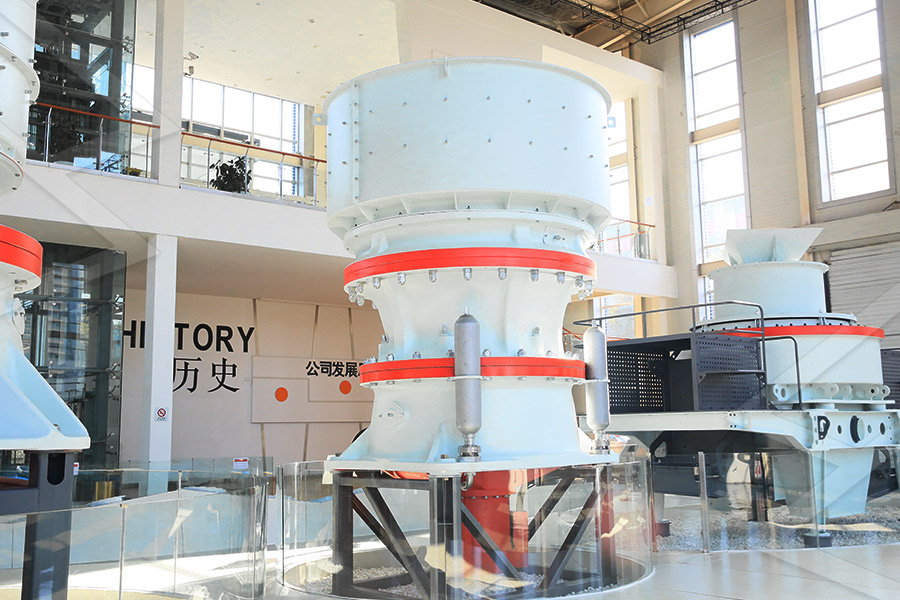
根据动颚体偏心轴与入料口高度的相互位置关系,复摆颚式破碎机可分为正悬挂、零悬挂和负悬挂;根据动颚体下端肘板的支撑方式不同,复摆颚式破碎机可分为正支撑、零支撑和 2012年11月5日 同时,动颚工作时有较大的水平行程,较小的垂直行程,动颚上各点的特性值小而且数值相差不大,破碎时整个颚板能较均匀接触物料,逐步将其破碎,改善了破 双腔颚式破碎机运动学特性研究 豆丁网
.jpg)
基于遗传算法的复摆式破碎机动颚运动特性优化
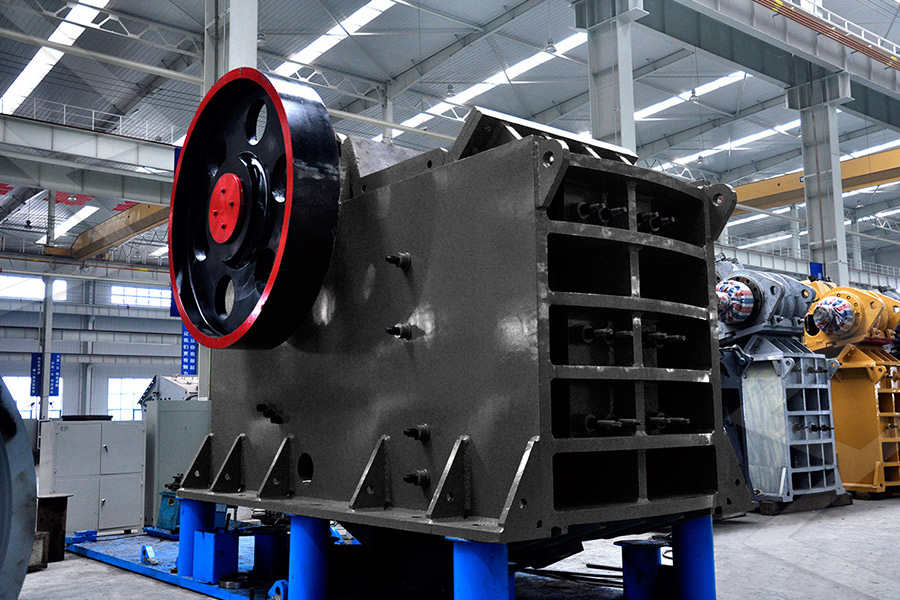
2017年3月18日 动颚的垂直行程使得动颚与定颚间产生垂直方向的相对运动,这种相对磨搓运动加剧动颚与定颚衬板的磨损,降低了衬板的使用寿命本文以降低动颚下部运动特性 2019年10月18日 双腔颚式破碎机以其独特的结构,将复摆颚式破碎机每个工作周期内的破碎行程与排料行程分解为两个破碎行程与两个排料行程,通过运动学分析与机构优化设 5种代表性颚破的特点分析:简摆、复摆、双腔、外动和振动颚破
.jpg)
颚式破碎机受力分析及主要零件强度计算百度文库
颚式破碎机的主要零件有:偏心轴、动颚、推力板、动颚的拉杆弹簧、轴承、机架以及飞轮等。 431 偏心轴强度计算 鉴于皮带拉力,飞轮与皮带轮的重量相对破碎力在偏心轴的分力来说其值甚小,为了方便起见可略去不计,这样,偏心轴的受力、扭矩、弯矩及当量弯矩就可按照图所示进行分析计算。2016年1月8日 DH 运动学模型中某些参数是不可以辨识的袁引入辨识距离误差矩阵的条件数袁通过计算条件数袁剔 除了机器人距离误差运动学参数模型中不可辨识的参数遥 最后对机器人可辨识的运动学参数误差进 行补偿袁从而提高了机器人的精度遥激光跟踪仪测量距离误差的机器人运动学参数补偿
.jpg)
基于视觉的六自由度机械臂运动学参数辨识
2020年7月20日 利用相应的优化算法,对运动学参数进行拟合辨识。11 运动学模型 文献[22]提出,一个有效的标定模型必须满足 完备性、比例性和连续性的要求。但是DH(DenavitHartenberg)建模方法在连续性上有着巨大的缺陷,特别是对于两个平行的相邻轴而言。当两针对复摆颚式破碎机这一典型传统产品,综合应用SolidWorks、CosmosMotion及CosmosWorks等现代设计与分析工具,实现了机构运动学与零部件有限元分析的集成仿真计算,得到了与实际相符的计算结果。 数据表明,动颚在往复摆动的周期内,应力大小随工作 复摆颚式破碎机运动仿真及有限元分析 百度文库
.jpg)
颚式破碎机受力分析及主要零件强度计算百度文库
颚式破碎机的主要零件有:偏心轴、动颚、推力板、动颚的拉杆弹簧、轴承、机架以及飞轮等。 431 偏心轴强度计算 鉴于皮带拉力,飞轮与皮带轮的重量相对破碎力在偏心轴的分力来说其值甚小,为了方便起见可略去不计,这样,偏心轴的受力、扭矩、弯矩及当量弯矩就可按照图所示进行分析计算。从以上两个图可以看出构件的角速度和角加速度的变化存在突变情况,这对传动过程不利。 构件2的角速度线图 构件5受力图 由受力曲线可以看出:构件5运动过程中,受力呈周期性变化,而且受力变化比较均匀,可以看到在加速度的转折处,受力是比较大的。颚式破碎机运动学、动力学分析 百度文库

动颚运动参数,kinematics parameters of moving jaw,音标,读音
2018年10月1日 本文由连续采煤机几何参数和运动参数与切屑断面积的关系式,定性分析了各种因素对落煤块度的影响。 2 To investigate the measurement radar of constant wave system, a high precision method is presented which can measure the movement parameters (velocity and acceleration) of multitargets simultaneously2023年12月18日 并非位置运动学和定向运动学的每种组合都是可能的,因为有时无法确定唯一的逆变换。一个例子是具有两个关节的 SCARA 作为位置运动学和 KinCAxisTool 作为在 X 或 Y 坐标中刀具偏移不为 0 的定向运动学。 SCARA 的法兰坐标系的方向不是恒定的。位置和工具运动学的结合
.jpg)
复摆颚式破碎机(600×750)设计计算书doc 原创力文档
2016年12月4日 破碎力平均分布在两个动颚轴承上,分别用F1,F2来表示;机架轴承要当于两个支座 径向载荷 Fr1=10778KN Fr2=10778KN 3、计算轴承的轴向力 在本机的设计中,轴承在理论上是不受轴向力的,但实际应有力的作用,但很小,忽略不计; 4、求 轴承的 2015年7月12日 2动颚危险截面的判定 由动颚的结构及机构受力图,D-D 截面为最大破碎力作用点所在面, 故该面需要进行校核 3 动颚截面的几何参数 图 4—4 动颚在图示D—D截面上强度最小,是危险断面,此处进行危险断面校核。 (1) 求截面形心位置: c y 2 1颚式破碎机受力分析及主要零件强度计算 豆丁网

机械原理课程设计颚式破碎机 百度文库
受力均呈现周期性的变化,并可在图线上看出最大值和最小值,这对于选择材料有很好的参考作用。 机械原理课程设计颚式破碎机三副构件2角速度线图三副构件2的角加速度线图从以上两个图可以看出构件BCE角速度和角加速度的变化是比较平稳的,这对传动 第二章 机械系统及机械运动简图 f (5)机构的尺度综合 )机构的尺度综合:根据原动件和各执 行构件运动协调配合的要求,考虑动力性 能的要求,确定机构中各构件的运动尺寸 或几何形状 (6)绘制机械系统运动简图:通过机构的 )绘制机械系统运动简图: 选型和机构的 第二章 机械系统及机械运动简图 百度文库

2 平面机构的运动简图及自由度 清华大学出版社
2017年11月8日 本章首先介绍组成机构最基本的环节——运动副及其类型;然后介绍工程中常用的机构运动简图的画法;最后重点讨论机构自由度的计算方法、机构具有确定运动的条件及其计算机构自由度时应注意的复合铰链、局部自由度和虚约束事项。 通过对本章内容的学习 2020年7月20日 利用相应的优化算法,对运动学参数进行拟合辨识。11 运动学模型 文献[22]提出,一个有效的标定模型必须满足 完备性、比例性和连续性的要求。但是DH(DenavitHartenberg)建模方法在连续性上有着巨大的缺陷,特别是对于两个平行的相邻轴而言。当两基于视觉的六自由度机械臂运动学参数辨识

机器人学:(3)机器人运动学CSDN博客
2023年3月23日 分类专栏: 机器人 文章标签: 机器人 版权 机器人 专栏收录该内容 4 篇文章 23 订阅 订阅专栏 机器人运动学(Kinematics)是从几何角度描述和研究机器人的位置、速度和加速度随时间的变化规律的科学,它不涉及机器人本体的物理性质和加在其上的力 2018年2月10日 颚式破碎机是较为理想的粉碎机械,目前广泛的应用在矿山,建材,化工和 冶金等行业中,结构较为简单,工作可靠且适应性强。 动颚具有很好的运动特性 是保证颚式破碎机具有最佳性能的根本因素,本文破碎机的最佳运动特性是借助 动力学仿真分析所 颚式破碎机运动分析 豆丁网

复摆颚式破碎机运动学及配重优化的研究分析 百度文库
复摆颚式破碎机运动学及配重优化的研究分析 摘要:改进优化现有复摆颚式破碎机的性能具有重要意义,本研究根据对复摆颚式破碎机的运动学和动力学分析,以某颚式破碎机为例,对其进行配重优化分析,以探讨颚式破碎机平衡的最优方法,得出的结果对企业 2017年7月29日 该双腔颚式破碎机的工作方式是2个破碎腔交替破碎物料,不存在空行程的能量消耗,能量利用率高,单位功率明显下降,处理能力大幅提高,金属单耗也明显降低。 该结构具有良好的机构运动特性,能极大地改善齿板的运动状态,使物料更有利于破碎,并对 双腔颚式破碎机的设计【含CAD图纸】doc 原创力文档

myCobot pro 机械臂(4)正向运动学——改进DH表示法
2021年11月27日 在实现机械臂运动学程序时,通常会用到几种关键算法,例如笛卡尔坐标系到关节坐标系的转换(DH参数法)、逆运动学求解和正运动学求解。DH参数法是一种标准的表示机械臂结构的方法,通过一组参数描述各关节之间的相对颚式破碎机的主要零件有:偏心轴、动颚、推力板、动颚的拉杆弹簧、轴承、机架以及飞轮等。 431 偏心轴强度计算 鉴于皮带拉力,飞轮与皮带轮的重量相对破碎力在偏心轴的分力来说其值甚小,为了方便起见可略去不计,这样,偏心轴的受力、扭矩、弯矩及当量弯矩就可按照图所示进行分析计算。颚式破碎机受力分析及主要零件强度计算百度文库
.jpg)
激光跟踪仪测量距离误差的机器人运动学参数补偿
2016年1月8日 DH 运动学模型中某些参数是不可以辨识的袁引入辨识距离误差矩阵的条件数袁通过计算条件数袁剔 除了机器人距离误差运动学参数模型中不可辨识的参数遥 最后对机器人可辨识的运动学参数误差进 行补偿袁从而提高了机器人的精度遥2020年7月20日 利用相应的优化算法,对运动学参数进行拟合辨识。11 运动学模型 文献[22]提出,一个有效的标定模型必须满足 完备性、比例性和连续性的要求。但是DH(DenavitHartenberg)建模方法在连续性上有着巨大的缺陷,特别是对于两个平行的相邻轴而言。当两基于视觉的六自由度机械臂运动学参数辨识
.jpg)
复摆颚式破碎机运动仿真及有限元分析 百度文库
针对复摆颚式破碎机这一典型传统产品,综合应用SolidWorks、CosmosMotion及CosmosWorks等现代设计与分析工具,实现了机构运动学与零部件有限元分析的集成仿真计算,得到了与实际相符的计算结果。 数据表明,动颚在往复摆动的周期内,应力大小随工作 颚式破碎机的主要零件有:偏心轴、动颚、推力板、动颚的拉杆弹簧、轴承、机架以及飞轮等。 431 偏心轴强度计算 鉴于皮带拉力,飞轮与皮带轮的重量相对破碎力在偏心轴的分力来说其值甚小,为了方便起见可略去不计,这样,偏心轴的受力、扭矩、弯矩及当量弯矩就可按照图所示进行分析计算。颚式破碎机受力分析及主要零件强度计算百度文库
.jpg)
颚式破碎机运动学、动力学分析 百度文库
从以上两个图可以看出构件的角速度和角加速度的变化存在突变情况,这对传动过程不利。 构件2的角速度线图 构件5受力图 由受力曲线可以看出:构件5运动过程中,受力呈周期性变化,而且受力变化比较均匀,可以看到在加速度的转折处,受力是比较大的。2018年10月1日 本文由连续采煤机几何参数和运动参数与切屑断面积的关系式,定性分析了各种因素对落煤块度的影响。 2 To investigate the measurement radar of constant wave system, a high precision method is presented which can measure the movement parameters (velocity and acceleration) of multitargets simultaneously动颚运动参数,kinematics parameters of moving jaw,音标,读音
.jpg)
位置和工具运动学的结合
2023年12月18日 并非位置运动学和定向运动学的每种组合都是可能的,因为有时无法确定唯一的逆变换。一个例子是具有两个关节的 SCARA 作为位置运动学和 KinCAxisTool 作为在 X 或 Y 坐标中刀具偏移不为 0 的定向运动学。 SCARA 的法兰坐标系的方向不是恒定的。2016年12月4日 破碎力平均分布在两个动颚轴承上,分别用F1,F2来表示;机架轴承要当于两个支座 径向载荷 Fr1=10778KN Fr2=10778KN 3、计算轴承的轴向力 在本机的设计中,轴承在理论上是不受轴向力的,但实际应有力的作用,但很小,忽略不计; 4、求 轴承的 复摆颚式破碎机(600×750)设计计算书doc 原创力文档

颚式破碎机受力分析及主要零件强度计算 豆丁网
2015年7月12日 2动颚危险截面的判定 由动颚的结构及机构受力图,D-D 截面为最大破碎力作用点所在面, 故该面需要进行校核 3 动颚截面的几何参数 图 4—4 动颚在图示D—D截面上强度最小,是危险断面,此处进行危险断面校核。 (1) 求截面形心位置: c y 2 1